





Mês: outubro 2021
SEL contrata estagiário na área de arquitetura
SEL contrata estagiário na área de arquitetura
O Departamento de Engenharia Elétrica e de Computação (SEL) da EESC-USP torna pública a abertura de processo seletivo para preenchimento de 1 (uma) vaga de estágio remunerado na área de arquitetura, com a finalidade de elaborar proposta arquitetônica de nova fachada, acesso e integração dos prédios do Departamento de Engenharia Elétrica e de Computação (EESC-USP).
As atividades serão desenvolvidas no âmbito do Departamento de Engenharia Elétrica e de Computação.
O valor da bolsa é de R$ 682,49 mensais (+ auxílio transporte), em jornada de 20 (vinte) horas semanais. O estágio terá a duração de 2 (dois) meses, podendo ser prorrogado para o desenvolvimento de outros projetos.
As inscrições serão realizadas até o dia 15/11/2021, por meio do formulário disponível neste link.
Para mais informações acesse aqui o Edital
Trabalho premiado no SBAI2021 garante energia com qualidade aos consumidores
Trabalho premiado no SBAI2021 garante energia com qualidade aos consumidores
Durante o Simpósio Brasileiro de Automação Inteligente (SBAI 2021), em cerimônia virtual realizada no dia 20/10/2021, o artigo intitulado “Controlador secundário distribuído fuzzy consenso aplicado em uma microrrede CA ilhada”, de autoria do aluno de mestrado Lucas Jonys Ribeiro Silva, do Programa de Engenharia Elétrica, da Escola de Engenharia de São Carlos, da USP, recebeu o “Prêmio SBA Melhor artigo” na categoria Mestrado como reconhecimento à excelência da contribuição do artigo, relevância do trabalho e qualidade da pesquisa.

O trabalho, realizado de uma parceria entre a EESC/USP e a Universidade Federal de Viçosa (UFV), aborda o desenvolvimento de um controlador secundário para microrredes CA isoladas, através de lógica fuzzy e técnica de consenso, que atua na correção de desvios de tensão e frequência e no compartilhamento preciso de potência reativa entre as unidades de geração, permitindo um melhor gerenciamento de carga na microrrede.
Considerando microrrede com algumas usinas de geração distribuídas de diversas fontes (eólica, solar, biomassa, etc.), operando conectadas entre si e fornecendo potência para cargas locais, o controlador opera mantendo a tensão e a frequência em um valor desejado (no caso do Brasil em 60Hz e 127/220V), o que garante o uso da energia com qualidade pelos consumidores da microrrede.
“Sem o controlador, as tensões e frequência teriam desvios do valor nominal, que são prejudiciais aos equipamentos. Além disso, o controlador permite que cada unidade de geração entregue uma energia proporcional ao que tem capacidade de produzir. A unidade de maior capacidade entrega maior energia para as cargas. Com isso, evita-se sobrecarga de alguma geração, o que permite aumentar a eficiência do sistema e a vida útil dos equipamentos”, explica o professor Ricardo Quadros Machado (SEL-EESC), orientador do aluno.
O artigo conta com a coautoria de Rodolpho Vilela Alves Neves (DEL/UFV), Ricardo Quadros Machado (SEL/EESC/USP) e Vilma Alves de Oliveira (SEL/EESC/USP) e o evento pode ser acessado em: https://sbai.ciente.live
Warthog Robotics é premiado na Competição Brasileira de Robótica
Equipe da USP São Carlos vence competição que desafia participantes a criarem robôs domésticos
Após quatro anos seguidos como vice-campeão, Warthog Robotics conquistou o primeiro lugar na categoria @home da Competição Brasileira de Robótica
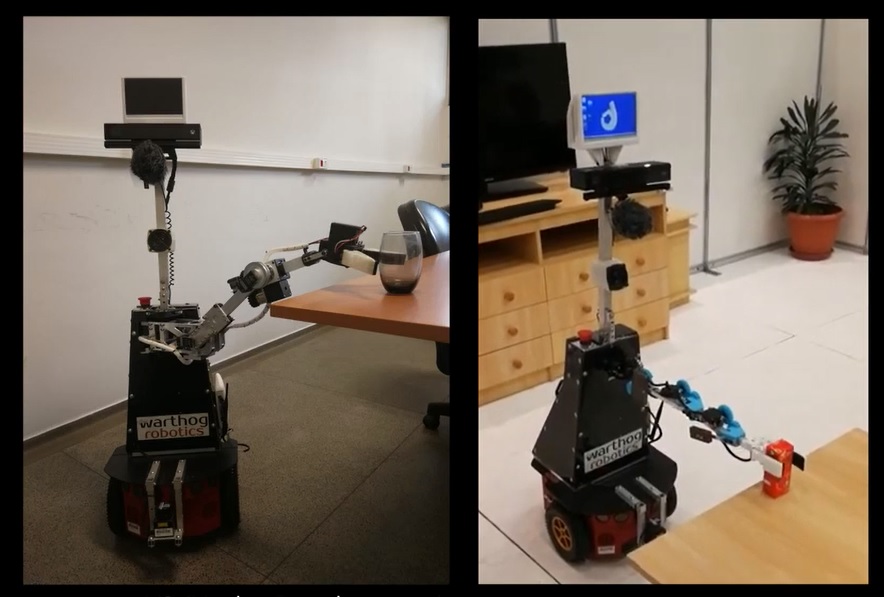
O Warthog Robotics, grupo de pesquisa e extensão formado por alunos do Instituto de Ciências Matemáticas e de Computação (ICMC) e da Escola de Engenharia de São Carlos (EESC), da USP, em São Carlos, conquistou o primeiro lugar na categoria @home da Competição Brasileira de Robótica (CBR) 2021, realizada de 11 a 15 de outubro, de forma remota.
No desafio, os competidores tinham que desenvolver robôs móveis de serviço para ambientes domésticos. Cada equipe deveria preparar códigos de computador (algoritmos) capazes de guiar as máquinas para que elas reconhecessem e manipulassem objetos, interagissem com humanos, desviassem de obstáculos, além de executar tarefas de forma autônoma. Neste ano, o Warthog adicionou ao robô um novo algoritmo de reconhecimento de gestos, que proporcionou mais uma forma de interação com a máquina. A novidade foi fundamental para a performance da equipe que, após quatro anos seguidos sendo vice-campeã, conquistou o tão esperado primeiro lugar na categoria.

“Acredito que o principal fator para o resultado desse ano foi a perseverança e o trabalho em equipe. Foram muitos dias de trabalho focados em resolver as provas da competição. Até mesmo membros do Warthog que não iriam participar da categoria pararam para ajudar com as tarefas, como na preparação de figuras para treinar os algoritmos a reconhecerem imagens. Depois de quatro anos seguidos em segundo lugar na competição, ficar em primeiro foi muito significativo para nós”, conta Guilherme Nardari, doutorando do ICMC e um dos membros do grupo vencedor.
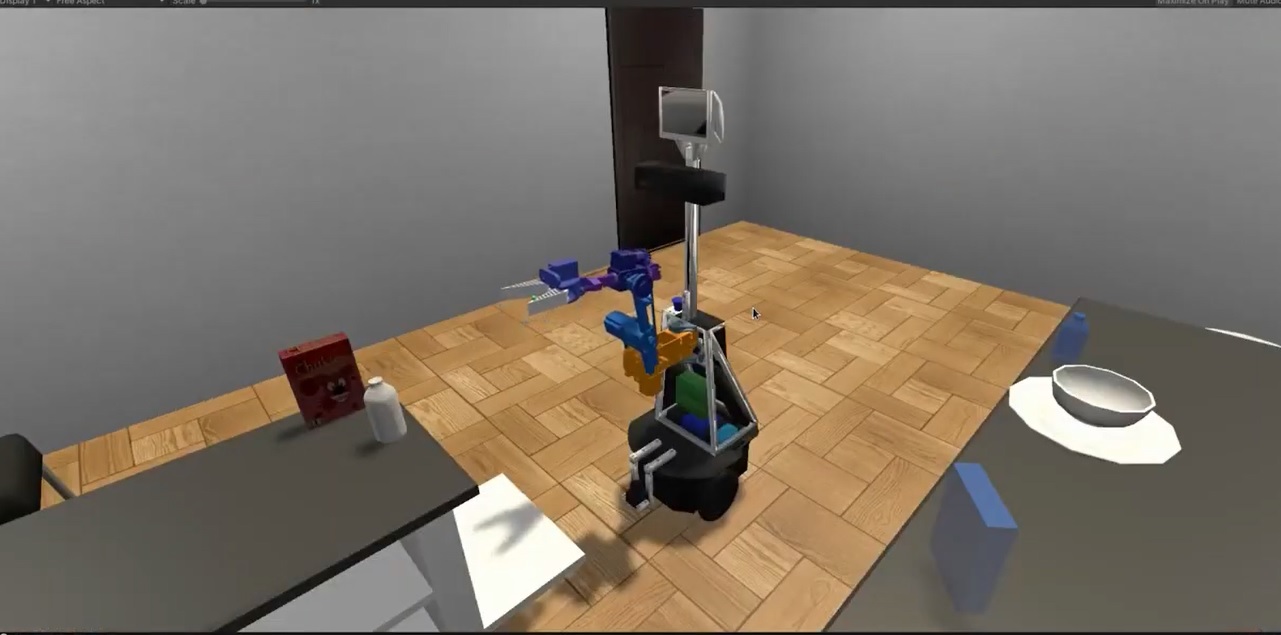
Assim como no ano passado, a competição foi realizada em formato virtual devido à pandemia de Covid-19. Por conta disso, as habilidades do robô foram avaliadas em uma casa simulada no computador, onde a máquina deveria, entre outras funções, pegar um objeto específico e levá-lo à pessoa que pediu e arrumar uma sala removendo objetos do chão e os guardando no local adequado. “Por se tratar de um projeto de robótica, não poder trabalhar com robôs físicos complicou bastante as nossas atividades, mas nos esforçamos para desenvolver ambientes simulados, em que nós colocamos uma versão do nosso próprio robô em uma casa virtual e lá conseguimos testar boa parte dos algoritmos criados pelo grupo”, ressalta Guilherme. Veja o vídeo do robô preparado pelo Warthog clicando neste link: www.youtube.com/watch?v=D3KIc4qN1OM.
O diretor geral do grupo, Rafael Guedes Lang, doutorando em Engenharia Elétrica da EESC, ressalta que o Warthog Robotics tem conseguido se manter como uma das principais equipes de desenvolvimento de robôs do Brasil. Com efeito, desde 2009, a equipe tem conquistado pódios em pelo menos uma das várias categorias da Competição Brasileira de Robótica.
Para tanto, a equipe conta sempre com o apoio e supervisão de seus dois tutores, a Profa. Tit. Roseli Aparecida Francelin Romero do Departamento de Ciências de Computação (ICMC) e o Prof. Tit. Ivan Nunes da Silva do Departamento de Engenharia Elétrica e de Computação (EESC), os quais gerenciam todas as atividades do grupo com o intuito de viabilizar as suas diversas demandas.
Sobre a CBR – A Competição Brasileira de Robótica está inserida no Robótica, evento que reúne também a Olimpíada Brasileira de Robótica e a Mostra Nacional de Robótica. Além das disputas práticas, a CBR valoriza as contribuições científicas dos participantes, tanto que, durante o campeonato, cada equipe deve apresentar um pôster com as novidades tecnológicas desenvolvidas durante o ano, além de preparar um tutorial de uma hora que ensina conceitos relevantes que podem ser implementados na disputa. A ideia é criar um material de qualidade para que novas equipes possam participar da competição.
Texto: Henrique Fontes – Assessoria de Comunicação do ICMC-USP com informações da equipe Warthog
Fotos: Warthog Robotics/Divulgação